Hey, I'm Aryaan
I'm a Mechatronics Engineering undergraduate at the University of Waterloo. Check out some of the projects I made!
Multi-Modal Autonomous Drone (In Progress)
- Mapping hand-pose to directional commands with predicted 85% accuracy via Mediapipe, reducing onboard compute load
- Validating stable ground-to-air handoff in Gazebo by simulating CoG, traction-to-lift dynamics across 0.5–2.5 m/s
- Bridging Raspberry Pi 5 and Pixhawk P4 via MAVLink, relaying gesture commands through ROS2 to flight controller
SWARM Hackathon (3rd Place)
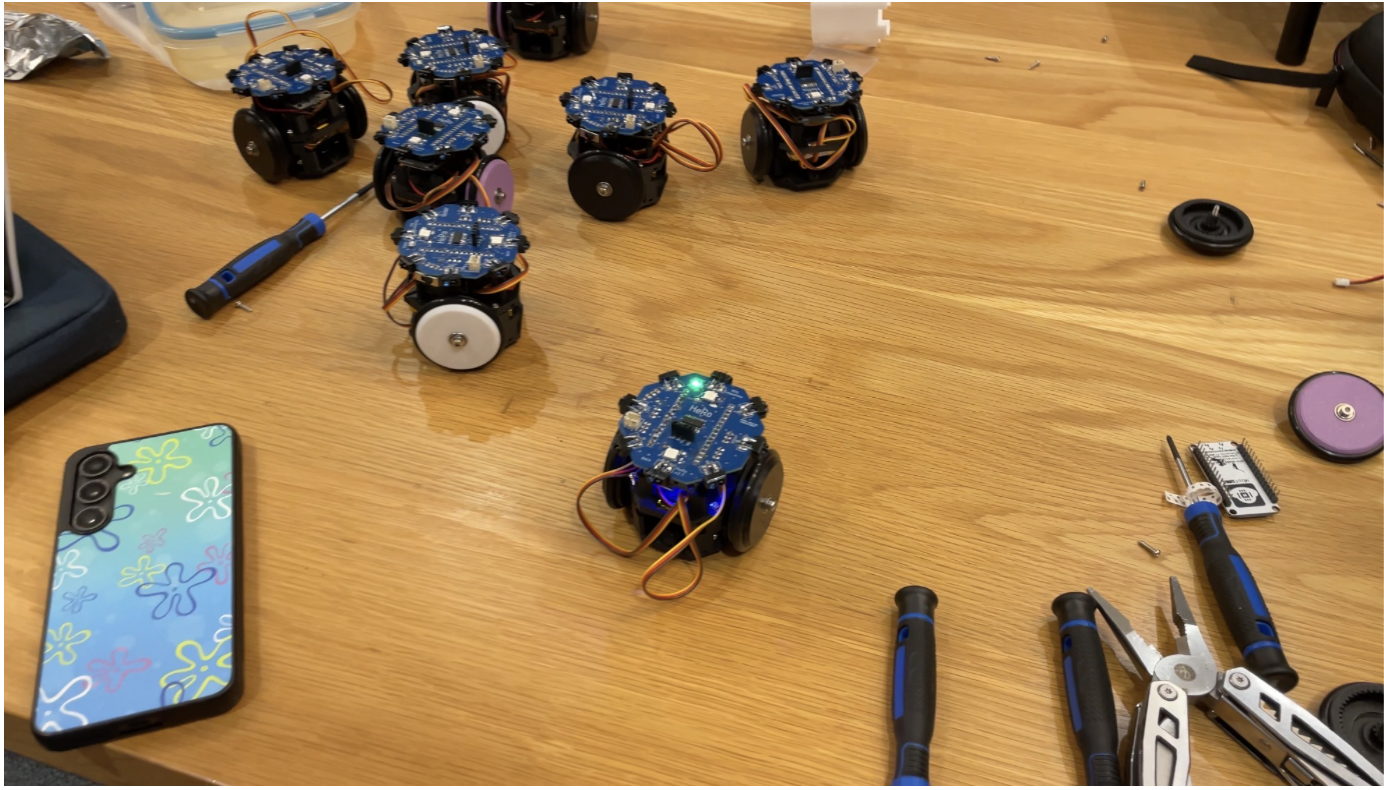
- Assembled and brought up 10 HeRo 2.0 swarm robots in a 48-hour hackathon by SMD soldering all hardware and flashing MicroROS firmware onto ESP8266 microcontrollers, achieving full operational status and functional locomotion, the only team out of 14 to do so
- Designed, led, and presented a novel swarm-based autonomous planet exploration concept featuring distributed memory mapping, winning 3rd place on the strength of the technical pitch despite hardware constraints limiting live demonstration
Autonomous Fishing Robot
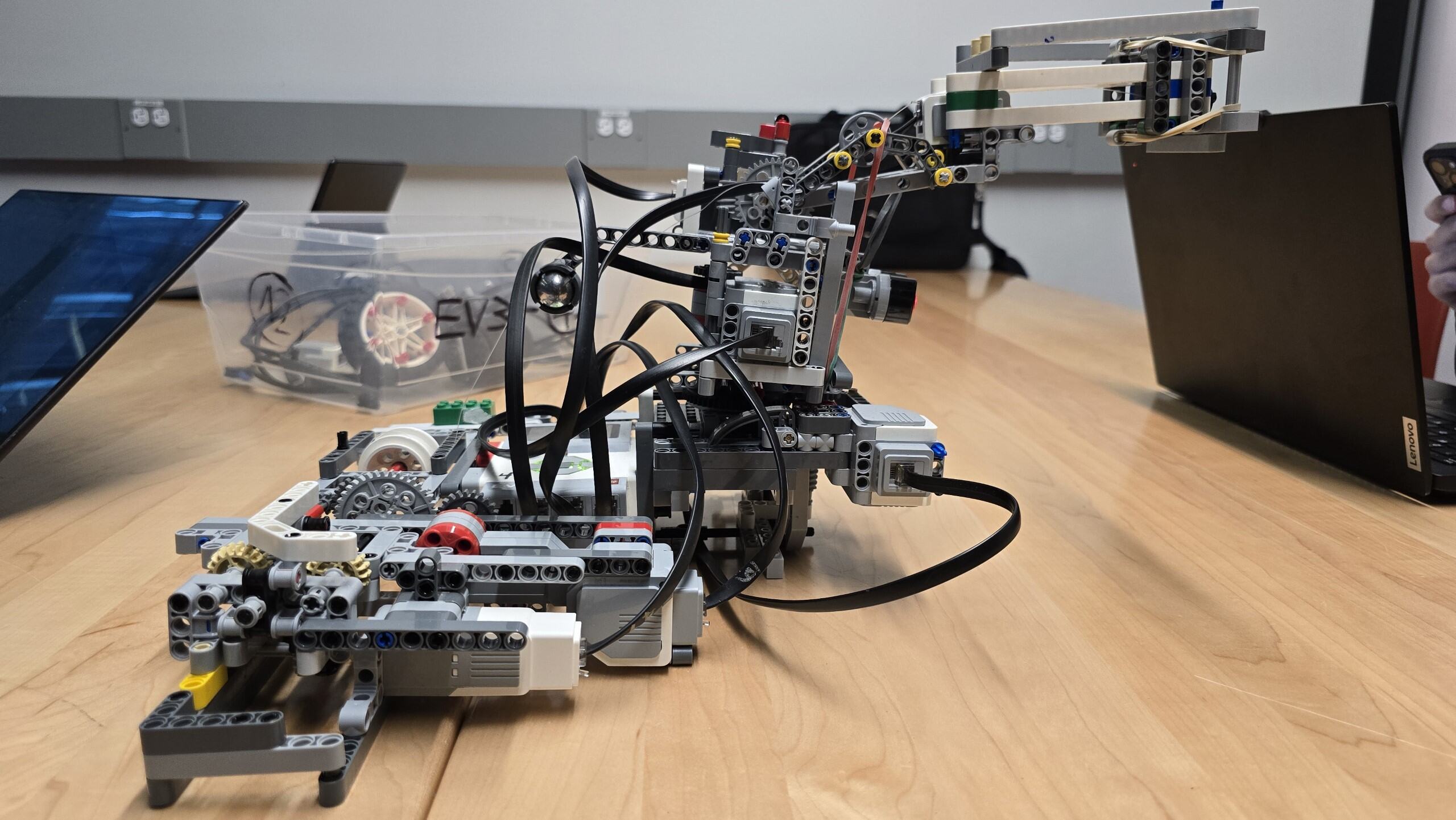
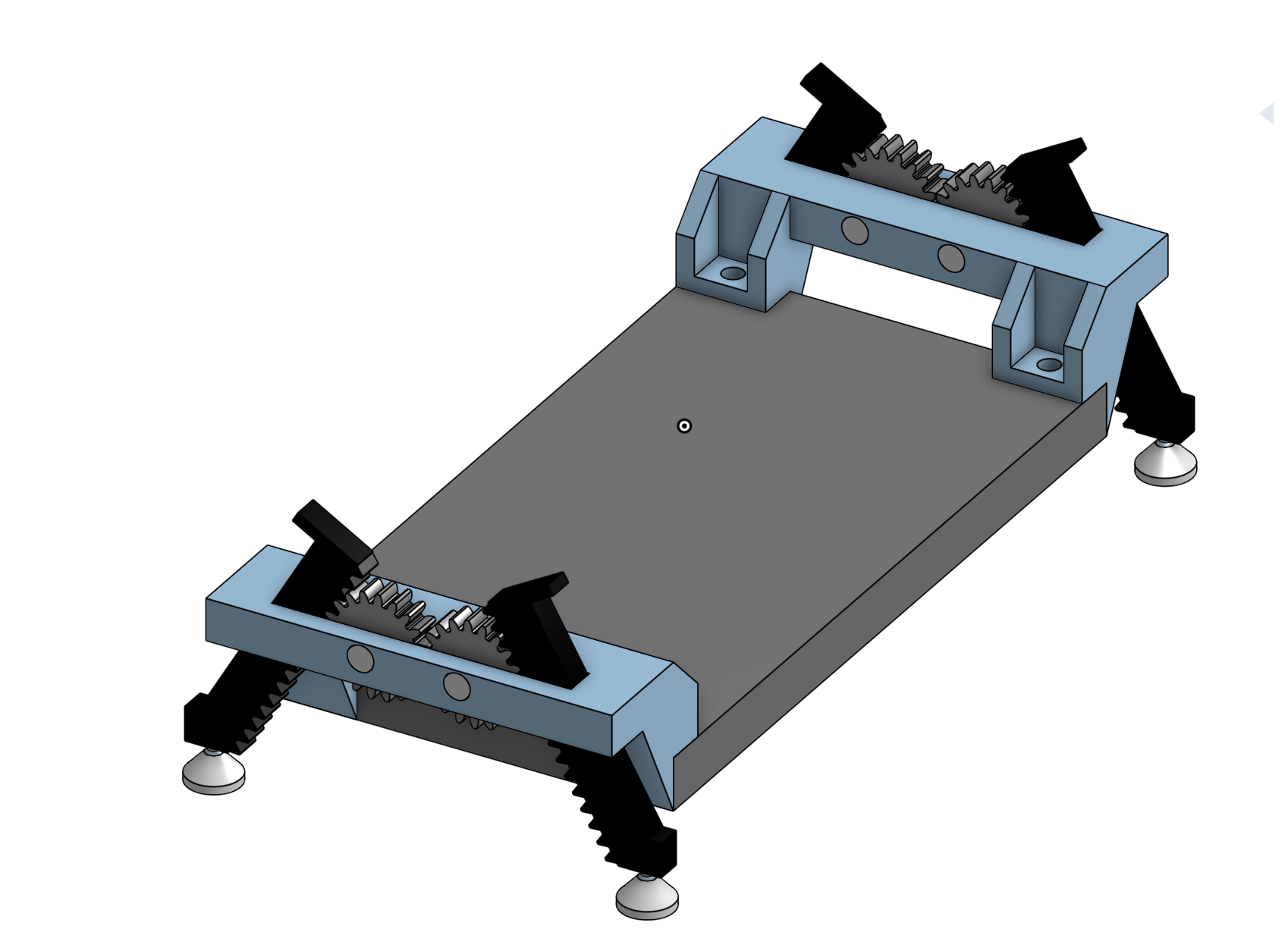
- Developed an autonomous fishing robot in a team of 4 on LEGO EV3 (RobotC) capable of detecting, casting to, and reeling in magnetic fish targets
- Created a single-speed gearbox with an electronically actuated neutral gear to precisely control casting force
- Designed high-level software architecture using flowcharts and block diagrams to define system boundaries across autonomous and manual modes, then implemented the core autonomous logic loops, real-time UI, and manual 2-axis turret adjustment